Advanced Tutorial 2 : build a Runge-Kutta solver for non-linear ODEs
📜 Previous base tutorial onRunge-Kutta solverfocused on the Dahlquist problem to explain how to use the \(Q\)-coefficients. But we can also use those for non-linear ODEsas long as \(Q\) is lower triangular.
Consider the following (non-linear) ODE system :
where \(t_0\) is the initial time. Computing the solution after one time-step \(u(t_0+\Delta)\) using the \(Q\)-coefficients (or Butcher table) or size \(M\) :
corresponds to approximating the solution at time nodes (or stages) \([t_1, \dots, t_M] := [t_0+\Delta{t}\tau_1, \dots, t_0+\Delta{t}\tau_M]\) by solving the all-at-once system :
where \({\bf u} := [u_1,\dots,u_M]^T\) is the vector containing the node solutions (or stages), \({\bf f} := [f(u_1, t_1),\dots,f(u_M,t_M)]^T\) the evaluations of each node solutions and \({\bf u}_0\) a vector with \(u_0\) in each of its entries.
Then, \(u(t_0+\Delta{t})\) can be approximated via the step update :
and this process can be repeated for each successive time-step.
📣 If we do not want to solve \((1)\) all-at-once (which can be very expensive for large problem), then \(Q\) must be lower-triangular to allow forward substitution, i.e solve for \(u_1\) first, then for \(u_2\) using the \(u_1\) solution, etc …
Prerequisite
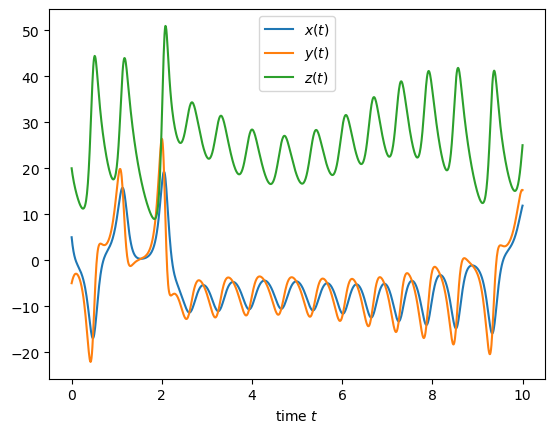
Consider for example the perturbed Lorenz attractor :
Before solving it, we first need to define its differential operator \(f(u, t)\) with \(u=[x,y,z]^T\) and the associated initial solution \(u_0\) for our problem :
[1]:
import numpy as np
u0 = np.array([5, -5, 20])
sigma, rho0, beta, epsilon = 10, 28, 8/3, 5
def f(u, t):
x, y, z = u
rho = rho0 + epsilon*np.sin(t)
return np.array([sigma*(y-x), x*(rho-z)-y, x*y-beta*z])
In addition, if we want to use an implicit method, we need to define a fSolve function that solves
for any \(\alpha\) and \(rhs\), using some uInit parameter as initial guess. To simplify, we can quickly implement one using the fsolve function of scipy.optimize (interface for MINPACK) :
[2]:
from scipy.optimize import fsolve
def fSolve(a, t, rhs, uInit):
def res(u):
return u - a*f(u, t) - rhs
return fsolve(res, uInit)
Implementation
Let’s retrieve some \(Q\) coefficients from qmat :
[3]:
from qmat import genQCoeffs
nodes, weights, Q = genQCoeffs("DIRK43") # Implicit RK method of order three in 4 stages
and define some arrays to store the node solutions, the step solutions and time values :
[4]:
uNodes = np.zeros((nodes.size, u0.size))
tEnd = 10
nSteps = 1000
uNum = np.zeros((nSteps+1, u0.size))
times = np.linspace(0, tEnd, nSteps+1)
Now, for each time step and time node, we have to solve
and compute the step update before next time-step :
This can be done with the following code :
[5]:
uNum[0] = u0
for i in range(nSteps):
dt = times[i+1] - times[i]
tNodes = times[i] + dt*nodes
# Solve for each time nodes (stages)
for m in range(len(nodes)):
rhs = uNum[i].copy()
for j in range(m):
rhs += dt*Q[m, j]*f(uNodes[j], tNodes[j])
if Q[m,m] == 0:
uNodes[m] = rhs
else:
uNodes[m] = fSolve(dt*Q[m, m], tNodes[m], rhs, uInit=uNum[i])
# Step update
uNum[i+1] = uNum[i]
for m in range(len(nodes)):
uNum[i+1] += dt*weights[m]*f(uNodes[m], tNodes[m])
And that’s it 🥳 ! We solved our non-linear time-dependent ODE on the given time frame, without caring about what’s in our \(Q\)-coefficients …
🔍 For a strictly lower triangular \(Q\) matrix (
Q[m,m]=0), there is no need for thefSolvefunction, as the solution is simply \(rhs\). That’s the case for all explicit Runge-Kutta methods.
We can plot the solution with respect to time :
[6]:
import matplotlib.pyplot as plt
plt.plot(times, uNum[:, 0], label="$x(t)$")
plt.plot(times, uNum[:, 1], label="$y(t)$")
plt.plot(times, uNum[:, 2], label="$z(t)$")
plt.legend(); plt.xlabel("time $t$");
Ideally, the previous code can be written into a function to allow multiple calls :
[7]:
def solve(nSteps, scheme):
nodes, weights, Q = genQCoeffs(scheme)
uNodes = np.zeros((nodes.size, u0.size))
uNum = np.zeros((nSteps+1, u0.size))
times = np.linspace(0, tEnd, nSteps+1)
uNum[0] = u0
for i in range(nSteps):
dt = times[i+1] - times[i]
tNodes = times[i] + dt*nodes
# Solve for each time nodes (stages)
for m in range(len(nodes)):
rhs = uNum[i].copy()
for j in range(m):
rhs += dt*Q[m, j]*f(uNodes[j], tNodes[j])
if Q[m,m] == 0:
uNodes[m] = rhs
else:
uNodes[m] = fSolve(dt*Q[m, m], tNodes[m], rhs, uInit=uNum[i])
# Step update
uNum[i+1] = uNum[i]
for m in range(len(nodes)):
uNum[i+1] += dt*weights[m]*f(uNodes[m], tNodes[m])
return times, uNum
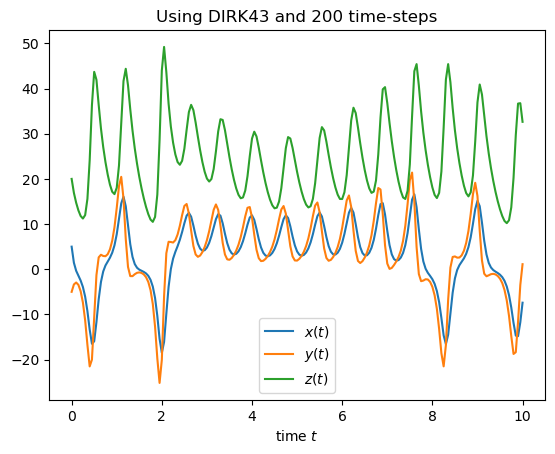
… which can be used to try different time schemes or resolution :
[8]:
times, uNum = solve(200, "DIRK43")
plt.plot(times, uNum[:, 0], label="$x(t)$")
plt.plot(times, uNum[:, 1], label="$y(t)$")
plt.plot(times, uNum[:, 2], label="$z(t)$")
plt.legend(); plt.xlabel("time $t$"); plt.title("Using DIRK43 and 200 time-steps");
[9]:
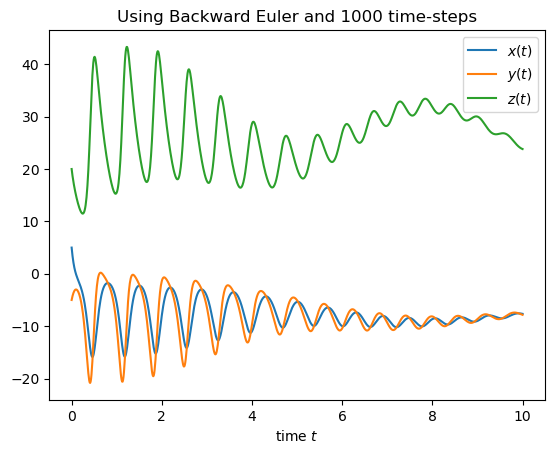
times, uNum = solve(1000, "BE")
plt.plot(times, uNum[:, 0], label="$x(t)$")
plt.plot(times, uNum[:, 1], label="$y(t)$")
plt.plot(times, uNum[:, 2], label="$z(t)$")
plt.legend(); plt.xlabel("time $t$"); plt.title("Using Backward Euler and 1000 time-steps");
Using the internal RK solver
Such generic Runge-Kutta solver is also available in qmat in the qmat.solvers.generic.CoeffSolver class, and uses a more efficient implementation than the one showed above, requiring less evaluations of \(f(u,t)\).
This implementation is based on a DiffOp class (differential operator) that implements the \(f(u,t)\) evaluation using the following template :
[10]:
from qmat.solvers.generic import DiffOp
class Yoodlidoo(DiffOp):
def __init__(self, params="value"):
# use some initialization parameters
u0 = ... # define your initial vector
super().__init__(u0)
def evalF(self, u, t, out:np.ndarray):
r"""
Evaluate :math:`f(u,t)` and store the result into `out`.
Parameters
----------
u : np.ndarray
Input solution for the evaluation.
t : float
Time for the evaluation.
out : np.ndarray
Output array in which is stored the evaluation.
"""
out[:] = ... # put the result into out
Note that the evalF function does not return the result, but rather put the result of the evaluation into the out array. This allows a memory efficient implementation of the different solvers that avoids any implicit data copy.
🔔 The
DiffOpbase class also provide a defaultfSolvemethod, so you don’t need to implement it.
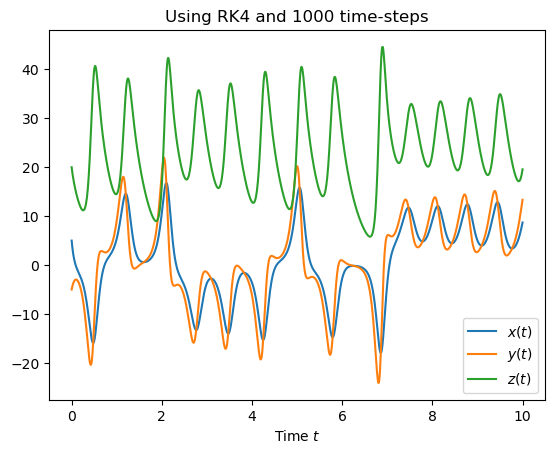
Some differential operators are already provided in qmat … for example, to solve the non-perturbed Lorenz system using a Runge-Kutta approach :
[11]:
from qmat import genQCoeffs
from qmat.solvers.generic import CoeffSolver
from qmat.solvers.generic.diffops import Lorenz
scheme = "RK4"
nSteps = 1000
solver = CoeffSolver(Lorenz(), tEnd=10, nSteps=nSteps)
nodes, weights, Q = genQCoeffs(scheme)
uNum = solver.solve(Q, weights)
plt.plot(solver.times, uNum[:, 0], label="$x(t)$")
plt.plot(solver.times, uNum[:, 1], label="$y(t)$")
plt.plot(solver.times, uNum[:, 2], label="$z(t)$")
plt.legend(); plt.xlabel("Time $t$"); plt.title(f"Using {scheme} and {nSteps} time-steps");
Eventually, you can also add your own differential operator into qmat, see the short developer guide on this aspect …
📣 This Runge-Kutta solver does not work if \(Q\) is a dense matrix. In that case, we can eventually use the Spectral Deferred Correction approach without too much additional code, which is the topic of the next advanced tutorial …